
DCモータを動かす(モータドライバ使用)(WebIOPi利用)
解説
モータードライバを使用すると、外部電源で駆動するモータへの入力電圧の制御を行うことができます。
モータードライバでは、電圧降下が起こります。モータードライバに接続した外部電源の電圧に対して、モータードライバから出てくる電圧は低くなります。5.18[V]
( 1.2[V] × 4本 ) の電源を接続し、IN1およびIN2へのPWM入力を100%とした場合、OUT1とOUT2の電圧の差は、4.54[V]
( OUT1 : 5.12[V]、OUT2 : 0.68[V] )ほどになっていました。
部品表
| 部品名 | 数量 | 商品名 | 参考価格 |
|---|---|---|---|
| モータドライバ | 1 | モータドライバ TA7291P | 2個300円 |
| 10KΩ抵抗 | 1 | カーボン抵抗(炭素皮膜抵抗) 1/6W 10KΩ | 100本100円 |
| モータ | 1 | ユニバーサルギヤーボックス付属のFA-130モーター | |
| ギヤ―ボックス | 1 | ユニバーサルギヤーボックス | |
| 電池ケース | 1 | 電池ボックス 単3×4本 横一列タイプBスナ付 バッテリースナップ(電池スナップ・Bスナップ)「横型」 |
電池ボックス : 60円 バッテリースナップ : 10円 |
| Raspberry Pi | 1 | Raspberry Pi 3 Model B | 6,300円 |
| ブレッドボード | 1 | EIC-801 | 250円 |
| ジャンパーワイヤ | 適量 | ブレッドボード・ジャンパーコード(オス-オス)セット | 100mm49個 150mm8個 200mm4個 250mm4個 のセット200円 |
| ジャンパーワイヤ | 適量 | ジャンパーワイヤ(オス-メス) | 10本300円 |
接続表
| TA7291P側 | Raspberry Pi側 | |
|---|---|---|
| ピン番号 | ピン名称 | ピン名称 |
| 1 | GND | GND |
| 2 | OUT1 | モータの片方 |
| 3 | - | 無接続 |
| 4 | Vref | 10kΩの抵抗器を経由して外部電源端子に接続 |
| 5 | IN1 | GPIO 23 |
| 6 | IN2 | GPIO 24 |
| 7 | Vcc | 5V |
| 8 | Vs | 外部電源端子 |
| 9 | - | 無接続 |
| 10 | OUT2 | モータのもう一方 |
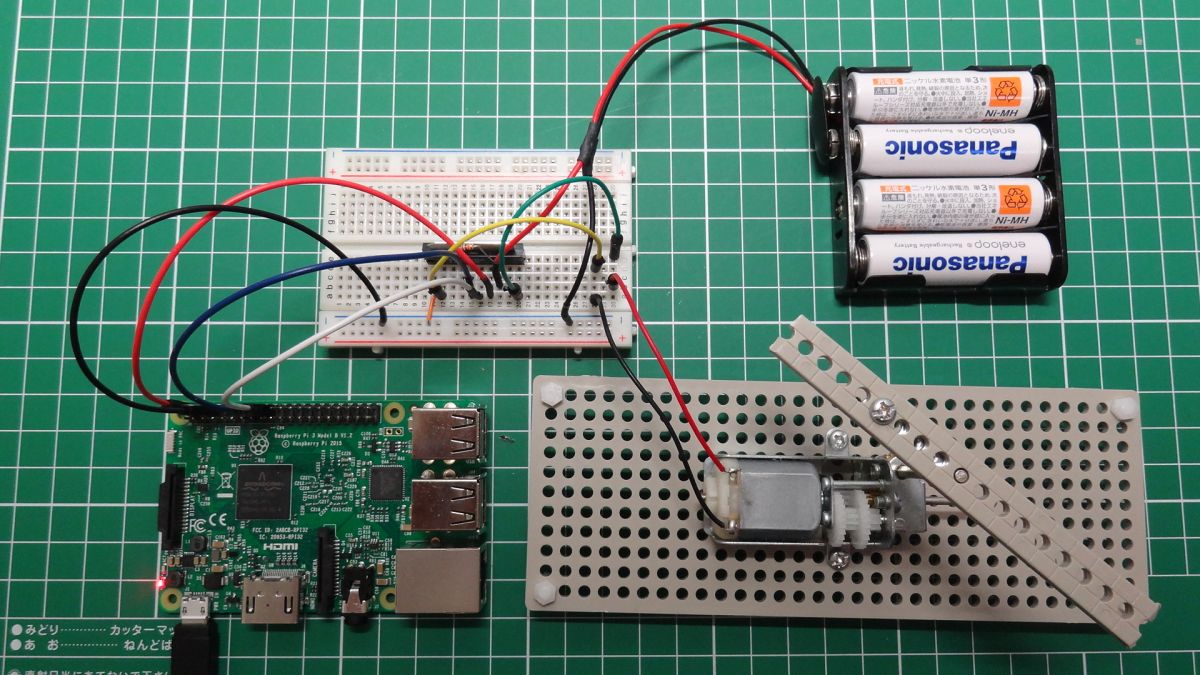
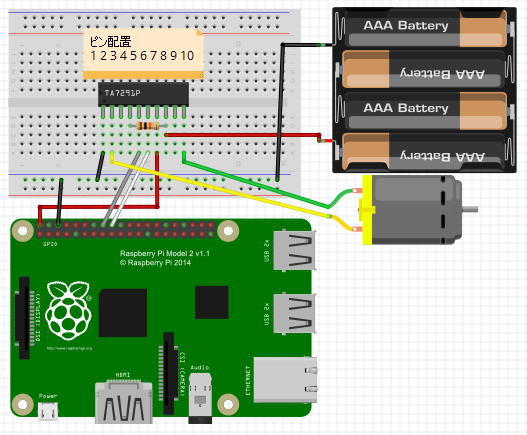
接続例
WebIOPiのインストール
Raspberry Pi にWebIOPiをインストールしてない場合は、まず、WebIOPiをインストールします。
WebIOPiのインストール
スクリプトファイルの作成
「/home/pi/work/webiopi」フォルダに、「motordriver.py」というファイル名で、以下の内容のスクリプトファイルを作成します。
WebIOPi サービスの設定の変更
WebIOPi のサービスを開始したときに、作成したスクリプトが実行されるように、WebIOPi サービスの設定を変更します。
WebIOPi サービスの設定は、「/etc/webiopi/config」ファイルに記述されています。
以下のコマンドを実行し、「/etc/webiopi/config」ファイルを開きます。
[SCRIPTS] セクションを探し、[SCRIPTS] セクションの「myscript =」に、作成したスクリプトファイルを指定します。
編集し終えたら、
Ctrl + O
で上書き保存し、
Ctrl + X
で nano を終了します。
実行
WebIOPi のサービスを開始します。
徐々に高速回転になり、その後、回転速度を減速し、逆回転になり、徐々に逆回転の高速回転になり、その後、回転速度を減速する、を繰り返します。
WebIOPi のサービスを終了するには、以下のコマンドを実行します。