
01.概要
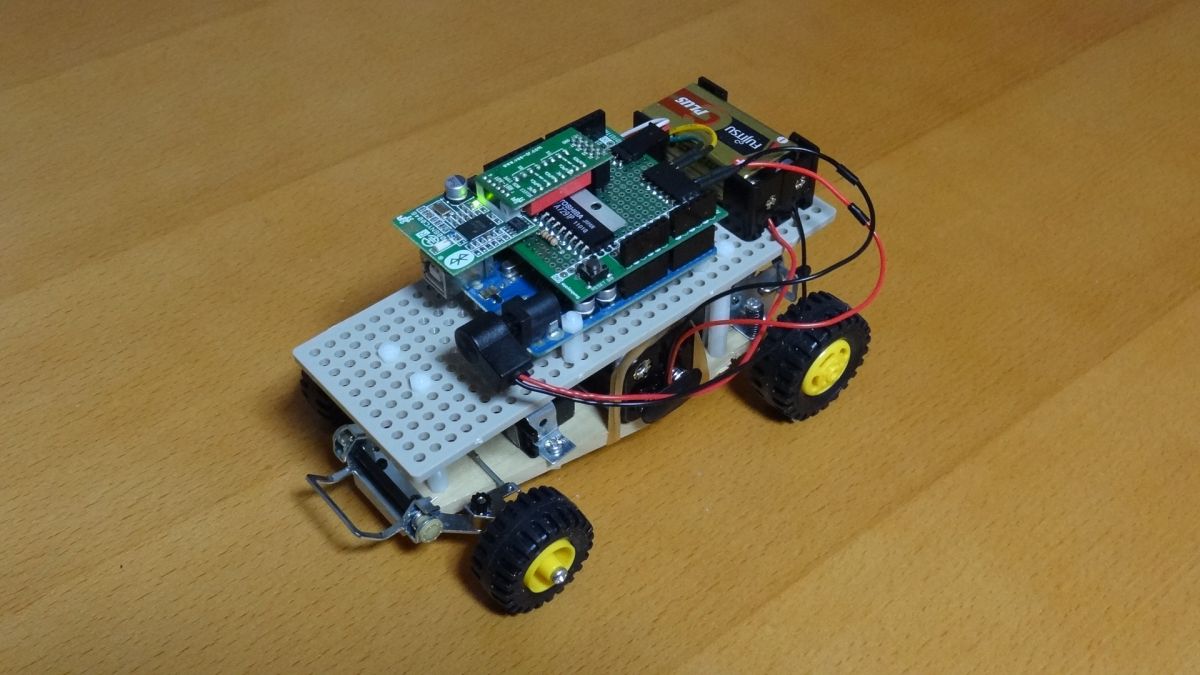
作成するRCカーの概要
仕組み、主要部品
| 車体 | 車体としては、タミヤの バギー工作基本セット を使用します。 | 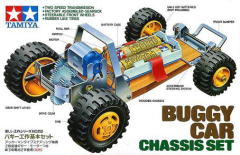 |
|---|---|---|
| 無線通信 | 無線通信は、Bluetooth。 受信機として、車体に、ArduinoおよびBluetoothモジュールを乗せます。 Arduinoの電源は、角型 9V 乾電池 を使用します。 Bluetoothモジュールの操作は、SoftwareSerialライブラリを使用します。 |
  |
| 駆動 | 駆動用モーターへの電圧を変えることで、前進、後進、速度変更をおこないます。 駆動用モーターの電源は、Arduinoの電源とは、別の電源(1.2[v]×4本)を使用します。 電圧の変更は、モータードライバを使用します。 |
 |
| 操舵 | サーボモーターで、直進、右に曲がる、左に曲がるをおこないます。 サーボモーターの電源は、Arduinoから供給します。 サーボモーターの操作は、Servoライブラリではなく、PWMServoライブラリを使用します。(割り込み処理をベース技術として利用しているServoライブラリの処理は、同じく割り込み処理をベース技術として利用しているSoftwareSerialライブラリの処理に無視できない副作用をもたらすので使用しません。) |
 |
| 操縦 | RCカーを操縦する送信機は、Bluetooth搭載のAndroidスマートフォンを使用します。 | 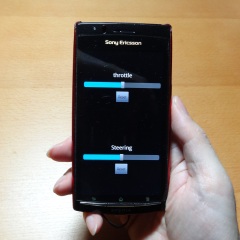 |
関連ページ
次項目:02.ハードウェア仕様