
05.受信側ソフトウェア実装

受信側ソフトウェア、すなわち車体のソフトウェア、すなわちArduinoのプログラムの実装。
概要
ハードウェア仕様、および、ソフトウェア仕様、に従い、Arduinoプログラムを実装します。
サーボモーターの操作は、Servoライブラリではなく、PWMServoライブラリを使用します。(割り込み処理をベース技術として利用しているServoライブラリの処理は、同じく割り込み処理をベース技術として利用しているSoftwareSerialライブラリの処理に無視できない副作用をもたらすので使用しません。)
PWMServoライブラリのインストール
PWMServoライブラリは、ArduinoのIDE(統合開発環境)には、標準では入っていないので、インストールします。
- 1.ダウンロード
- PWMServoライブラリ配布サイト(http://arduiniana.org/libraries/pwmservo/)の「Download」より、「PWMServo_v2.zip」ファイルをダウンロードします。
- 2.解凍
- 「PWMServo_v2.zip」ファイルを解凍します。
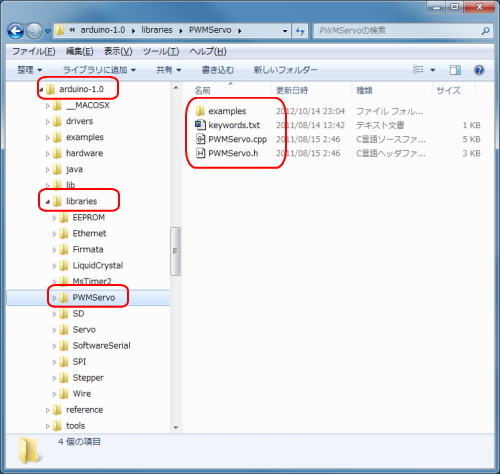
解凍すると、「PWMServo」フォルダができます。 - 3.配置
- 「PWMServo」フォルダを、Arduino IDEの「libraries」フォルダの下に配置します。
以上で、PWMServoライブラリのインストールは終了です。
コード
ダウンロード
関連ページ
前項目:04.ソフトウェア仕様
次項目:06.送信側ソフトウェア実装